OSHE (Deer Dissuader) Spring 2025: Project Update 12 (Apr. 20th)
Final Project Image

TO DO List
- Revise report draft
- Update the BOM
- Update Sponsorship
- Begin Preparing for next semester project
- Contact Team Members
- Delve deeper into research
- Look into learning potential skills required for project
OSHE (Deer Dissuader) Spring 2025: Project Update 11 (Apr. 13th)
TO DO List
- Review assigned report draft for another group
- Edit Report Draft based on recommendations
OSHE (Deer Dissuader) Spring 2025: Project Update 10 (Apr. 6th)
TO DO List
- Write documentation
- Schedule meeting for project showcase
OSHE (Deer Dissuader) Spring 2025: Project Update 9 (Mar. 30th)
TO DO List
- Format Documentation for Deer Dissuader
- Create Instructions for recreating the project
- If necessary finish any requirements from project proposal
OSHE (Deer Dissuader) Spring 2025: Project Update 8 (Mar. 23rd)
To Do List
- Finish writing code
- ssh to Pi
- Create audio files for deterrent
- Begin writing documentation
OSHE (Deer Dissuader) Spring 2025: Project Update 7 (Mar. 16th)

Image: Demonstrates working Image sensor
TO DO LIST
- Review prior code for BIRD system (specifically speakers)
- Purchase longer ribbon cable
- Write code for speakers
- Write code for PI to isolate image of deer
- When deer detected, have PI communicate to speakers
- Record audio for speakers to play
- Move files and documentation to Github
OSHE (Deer Dissuader) Spring 2025: Project Update 6 (Mar. 9th)
TO DO LIST
- Review prior code for BIRD system (specifically speakers)
- Purchase longer ribbon cable
- Write code to operate speakers
- Begin creating audio files for speakers to play
- Move files and documentation to Github
- Implement camouflage for casing
Concerns
- Finding time to make orders and check status of previous orders
OSHE (Deer Dissuader) Spring 2025: Project Update 5 (Mar. 3rd)
Progress Images


TO DO LIST
- Get image sensor to communicate with the PI
- Contact advisors for any additional input
- Begin coding speakers and creating audio files
- Get the PI to connect to multiple other networks
- Order new ribbon cable for image sensor
- Potentially look into new image sensor
- Move files and documentation to Github
- Implement camouflage for casing
OSHE (Deer Dissuader) Spring 2025: Project Update 4 (Feb. 16th)
TO DO LIST
- Get image sensor to communicate with the PI
- Contact advisors for any additional input
- Begin coding speakers and creating audio files
- Sign up for Maker event
- Get the PI to connect to multiple other networks
- Currently can only connect to a single hot spot
Concerns
- Finding a way to work on project over break
- Mostly learning more for the necessary skills of project
- Finding a solution for how to handle solar panel attachment to casing
OSHE (Deer Dissuader) Spring 2025: Project Update 3 (Feb. 4th)
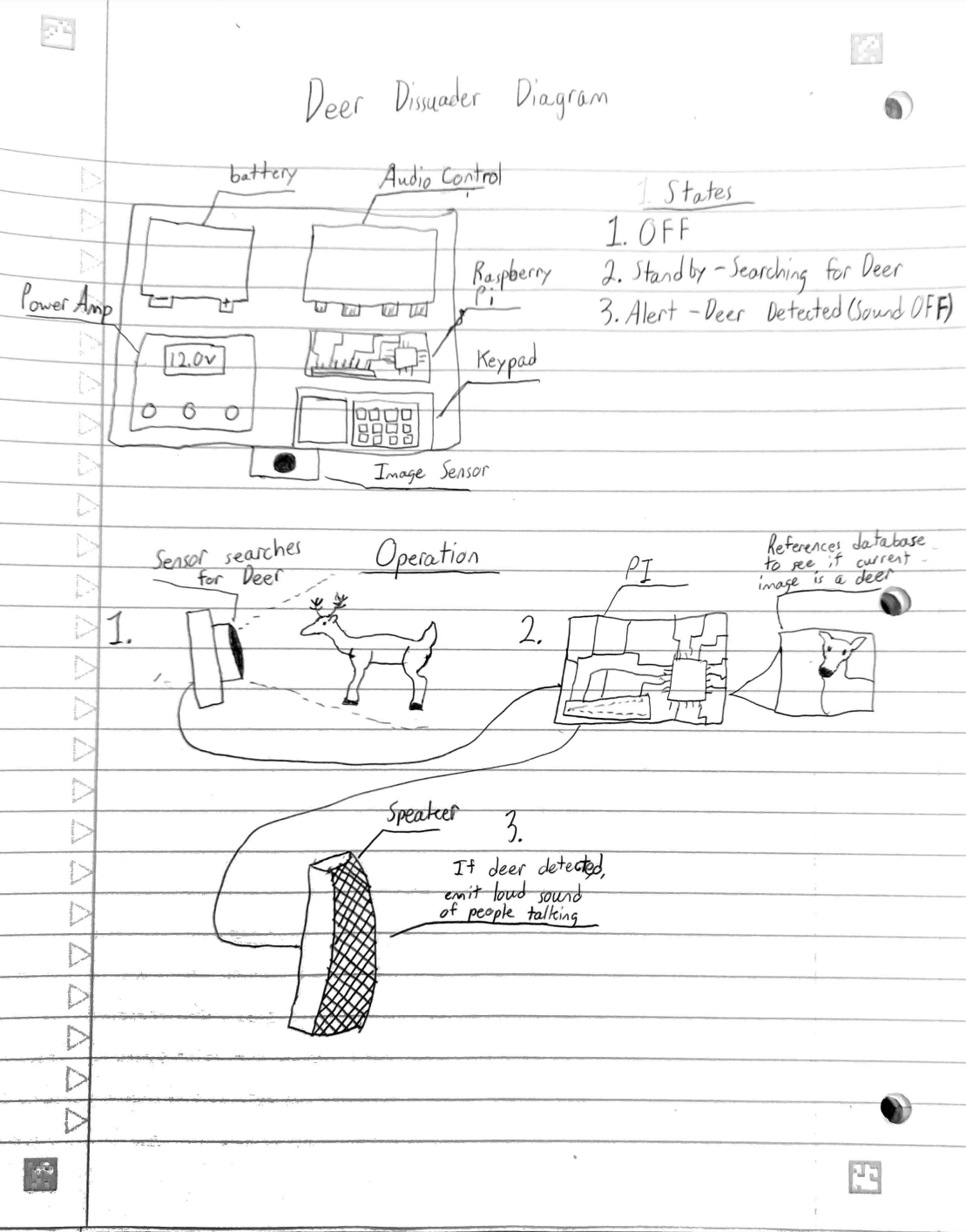
Fig. 1 (Diagram for Deer Dissuader)
Reflection:
- Learned Python and OpenCV
- Ordered necessary parts for project
- Relearn KiCAD
TO DO LIST
- Finalize Deer detection system image database
- Implement OpenCV to allow the PI to communicate with the sensor
- Begin testing the deer detection system
- Begin attempting to get the PI to communicate with the speakers
OSHE (Deer Dissuader) Spring 2025: Project Update 2 (Jan. 26th)
Completed Items
- Began learning Python and CV Library
- Overview of PCB schematic for Bird
- Put together items for order
- Started relearning KiCAD
TO DO List
- Continue learning python and CV Library
- Make order for sensor
- Start making code for detection module
- Get access to previous BAD (Bird Attractant and Deterrent) Folder
- Continue going over KiCAD
- Look into flexible solar panels
- Set proper routine for team meetings
Concerns
- Finding time to work on project for this next week
OSHE (Deer Dissuader) Spring 2025: Project Update 1 (Jan. 20th)
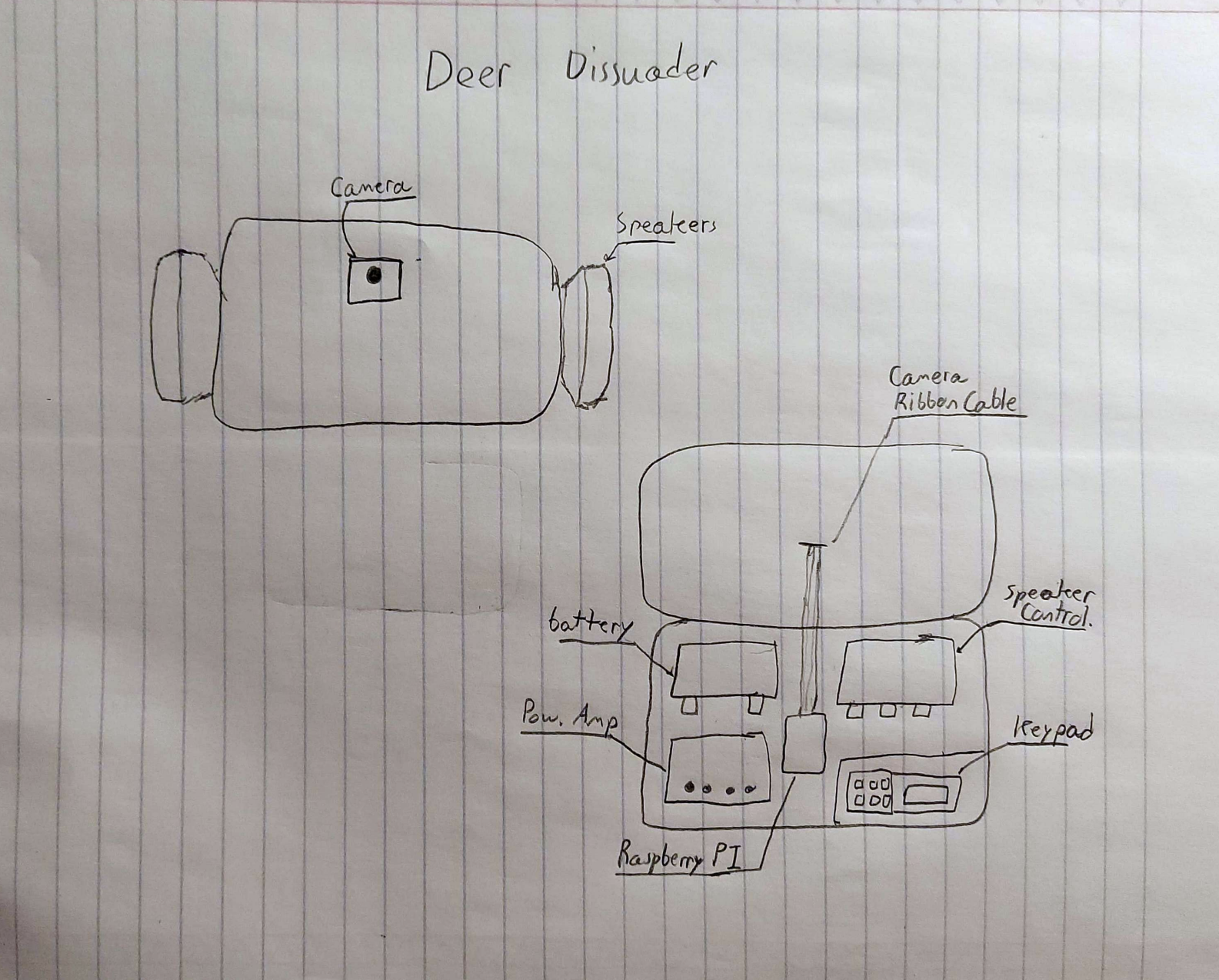
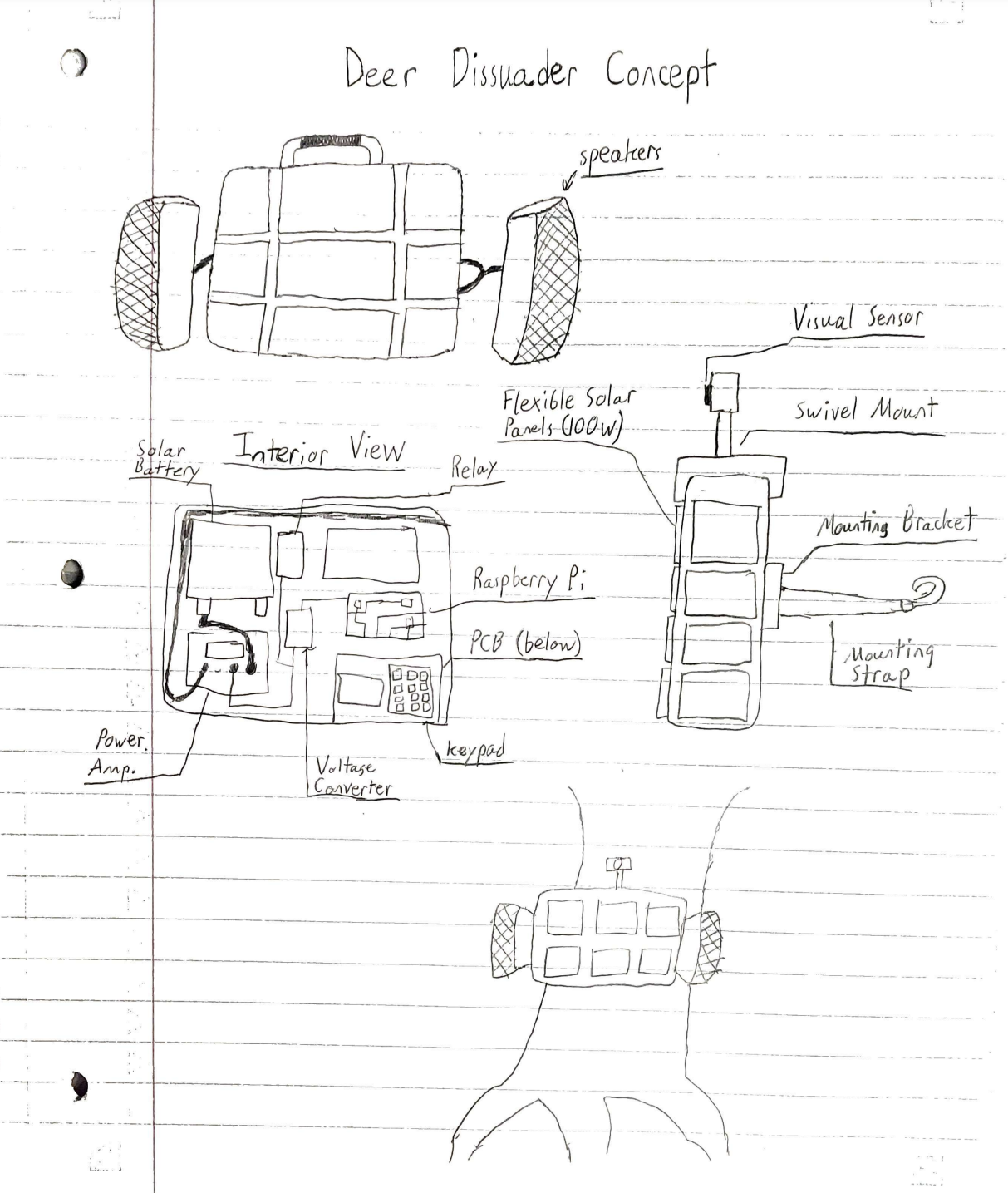
Figure 1: Concept Sketch for End of Semester
Note: Visual Sensor will be programmed to detect the relative shape of deer using open computer vision library for python. The system will use a multitude of reference images to identify a deer. Upon successfully detecting a deer the sensor will communicate with the Pi to activate the speakers to produce a deterrent.
TO DO List
- Research Python coding language
- Research Computer Vision Library and YOLO (You Only Look Once)
- Order necessary components for detection system
- Get access to previous BAD (Bird Attractant and Deterrent) Folder
- Look at prior schematics
- Analyze current python code for system
- Get in contact with previous computer engineers from BAD last semester
- Look into KiCAD software and PCB design
- Look into flexible solar panels
- Set proper routine for team meetings
Concerns
- Finding a time each team member is fully available to meet routinely
- Learning python and the CV library
OSHE Week 4 Update
Completed Tasks
- Research vacuum chamber components
- Research examples of E-STOP
- Research filament manufacturing
TO DO LIST
- Discuss potential safety issues with current extrusion design
- Meet with team sponsor
- Discuss with BREAD and Open Mobility about Rewind Unit and Vacuum Unit
- Acquire certification for soldering
- Discuss with team specific components still needed for Vacuum Unit
Concerns
- N/A
OSHE Week 3 Update
To Do List
- Begin developing ideas and designs for vacuum chamber and safety measures
- Research vacuum chamber functionality and component requirements
- Review current E-STOP for Recyclebot
- Research examples of E-STOPs for redesign
- Continue creating BOM
- Discuss with team current designs for the main units and potential hazards with the design
- Research safety precautions for discussed hazards
- Research how filament is currently manufacture to compare to Recyclebot
- Specifically how filament is cooled and wound onto spools
- Construct drawings and schematics for vacuum chamber
- Acquire certification for soldering in OSHE Lab
Concerns for Next Week
- Finding time to discuss with full team about plans moving forward
- Breaking the vacuum unit into different components to be discussed
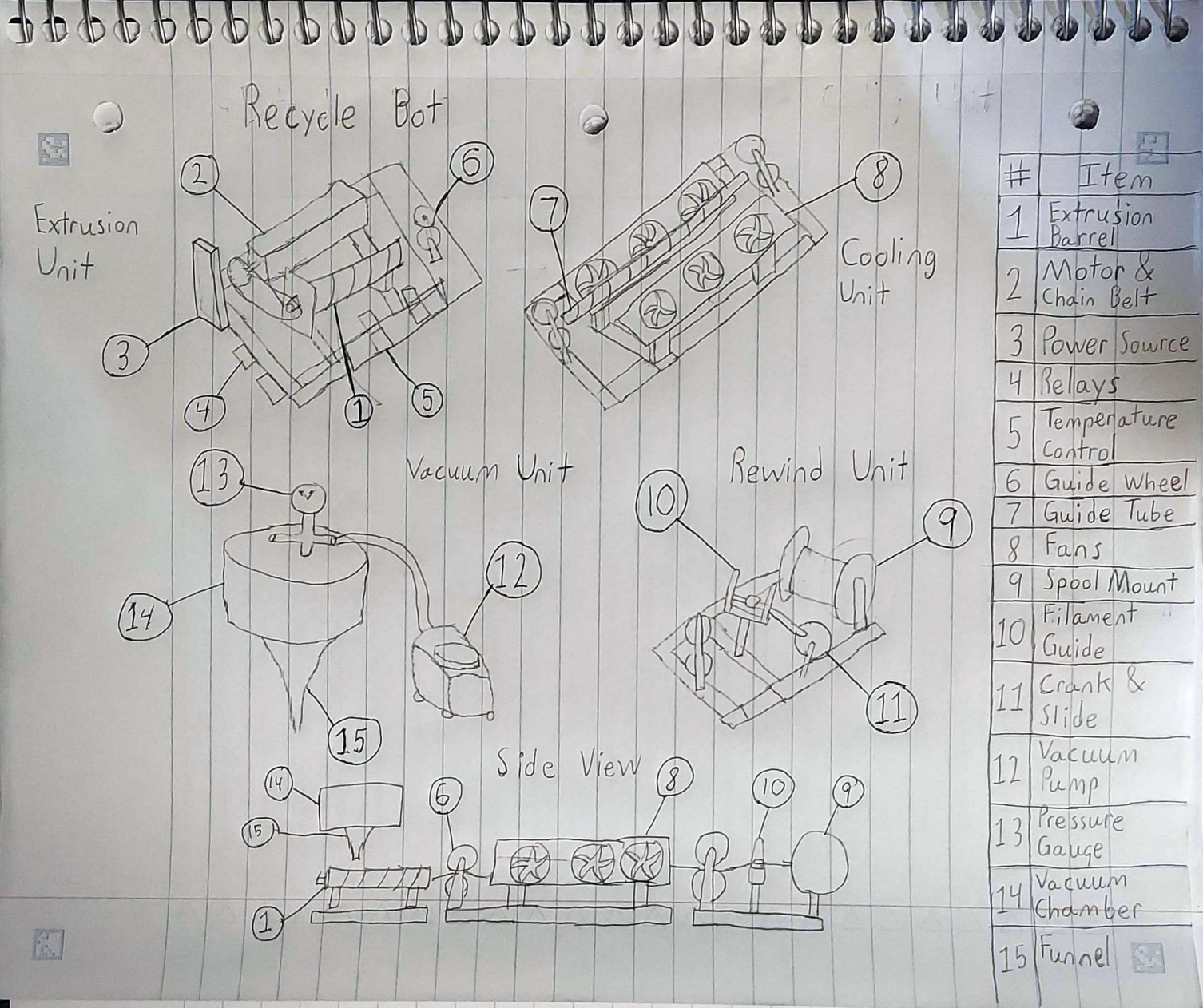
My Sketch of Recyclebot Design