
1/27/2024
To Do List:
- Figured out how to stop the growth from moving when there’s no power. There is a failsafe that will change the output from whatever it is currently at, to a specified value. This must be implemented in software now. Probably in the form of an interrupt so that it does
- Fix Receiver drawing to much power from the Arduino (possibly easy fix with a decoupling cap)
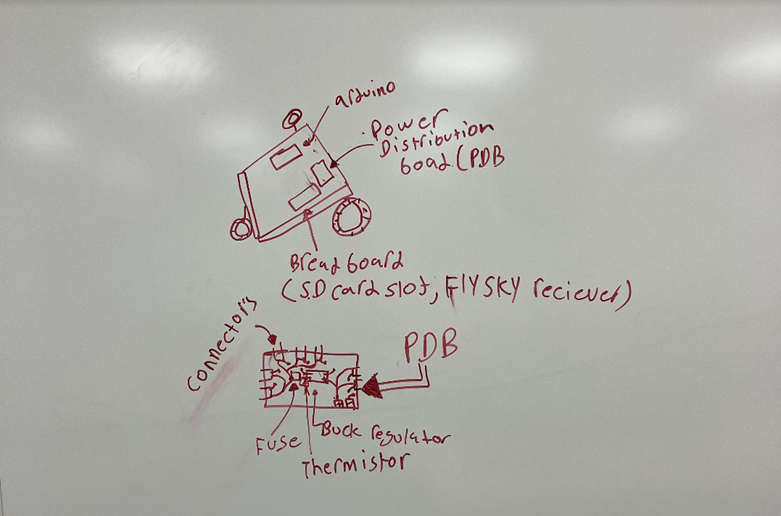
- Continue researching components for a PDB
2/3/2024
-Met with GM to discuss issues, and what we solved related to growbot related to growbot and how we can fix them
-No concerns with the coming week and there is nothing more to add to my to do list
2/10/2024

– Obtained a Emergency stop to cut power to the robot in event of an emergency
– Have buck converter
– Met with team to discuss different components
– Concerns right now are that the E-stop has a rated resistance of 10k ohms, however measuring the resistance of the switch with a meter shows it has 66k ohms. Worried about this causing problems.


Torn between two different types of fuses
2/17/2024
– Met with GM
– Decided on the below components

– Power rail for effective power distribution

– And this step down buck converter
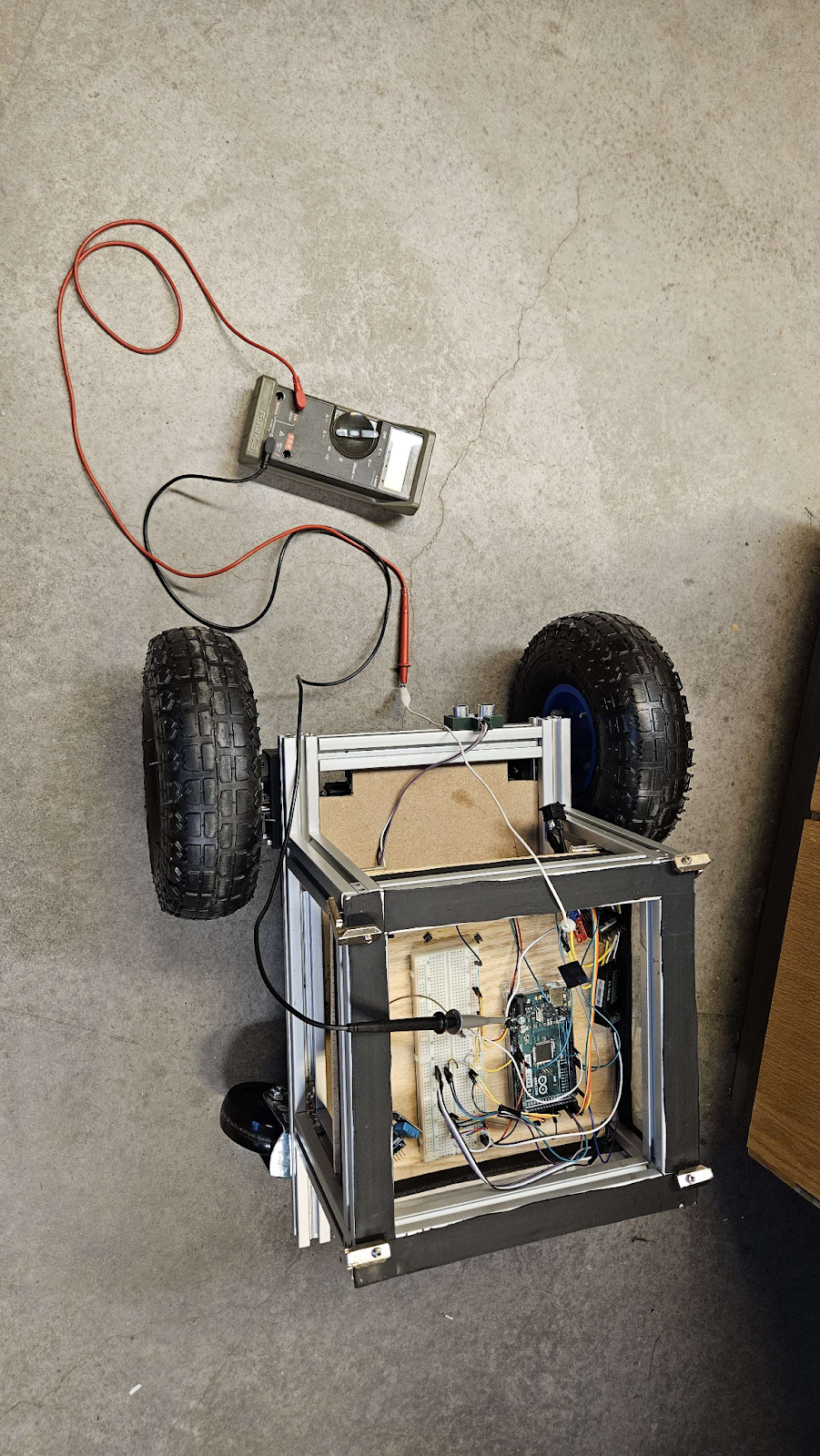
– Did testing to determine the amount of current that is drawn from the motor both under load and not
– This was done using an amp meter the peak current was .6A for the motor and the other electronics were in the mA range
– No concerns regarding next week and im not sure what to do for next week outside of the CDR
2/24/2024
-CDR there are a few things that need to be addressed. Fuses need to be bumped up from what we had though about originally, we need to have higher amp fuses for the motors. originally 2 amps.
-need 6 amp fuse possibly for stall current
-need to do testing to figure out the right fuse size
-A relay is what is used to help with the resistance of the E – stop so its not in series with the circuit.
3/10/2024
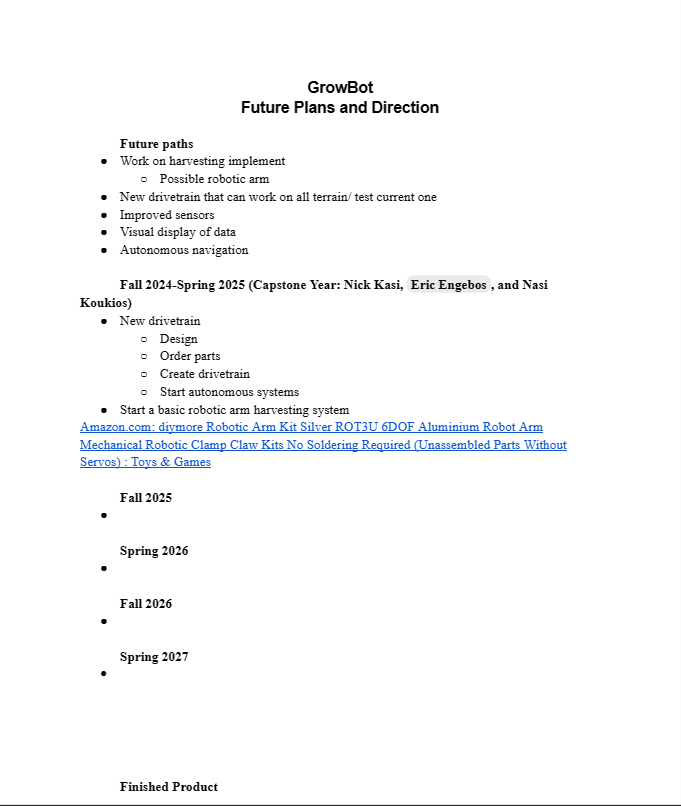
A huge problem related to growbot is that there hasn’t ever been a clearly defined route that needed to be followed for each year. As new people enter and exit the project growbot takes a different path. Therefore what was done last was planning for the future of growbot, what we need to focus on for this semester, next yearm and what future students should focus on and what a finished product looks like.
-No concerns with the coming week, our buck converters have arrived along with the other things ordered.
3/18/2024
– Last week we had met with GM to discuss the current state of the project.
– No concerns over This week
This week
– Obtained most of the parts so now we can begin to assemble the components together for a effective power distribution system.
3/23/2024
-Hooked the emergency kill switch up to the relay and tested to see if it powered the arduino and the sensors
No concerns for next week. The Arduino successfully turns on and everything works properly
3/30/2024
-Did the planning for where every component will go once it is placed in growbot
-Added the shields to the buck converters
– Tested to make sure that buck converters are set to the right setting
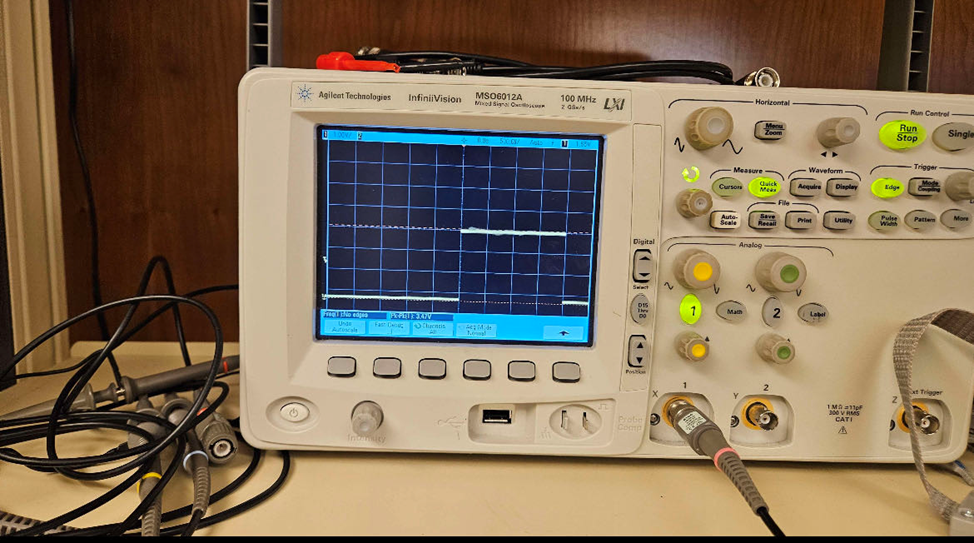
– Hooked receiver to oscilloscope so to make sure reciever is still working
4/6/2024
This week was more focused on Wiring the motors to the rest of the system with a big emphasis on writing the report draft and making the social media.
– A kill switch was added to the side of the panel as well.
– Overall layout of where the power electronics should be has been decided
Next week will essentially be securing the electronics in the power board and possibly just brushing up on some of the wire organization so its cleaner to see. This could be done with any zip types. It would also be nice to have the coloring of the wires being consistant. Black and red for ground and power respectivly, and white or yellow for any signal wires.
No concerns for next week.
4/14/2024
Nothing actually happened for this week. The only thing that was left was to make the final presentation for GM and present to them what we did that week.