
BREAD Standards Update
9/29/24
Progress
- Got CAN communication working on breadboard
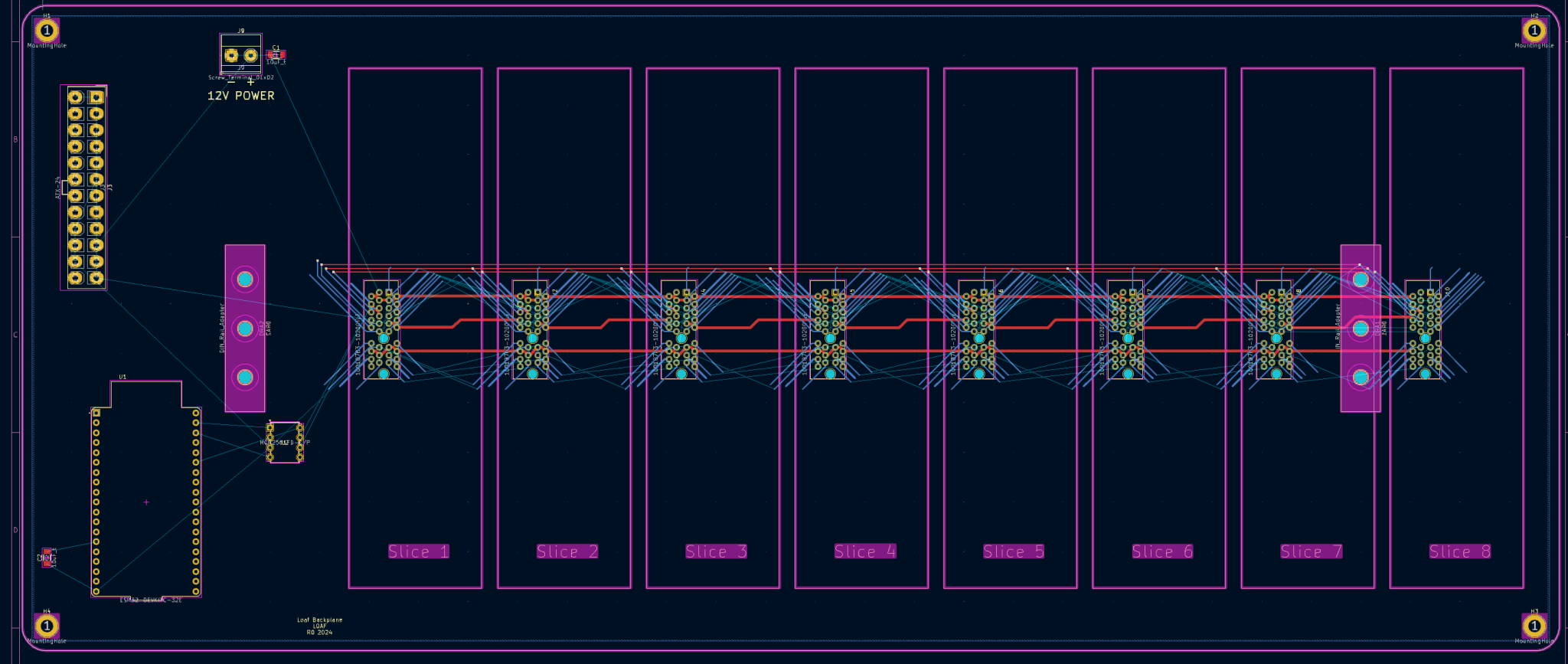
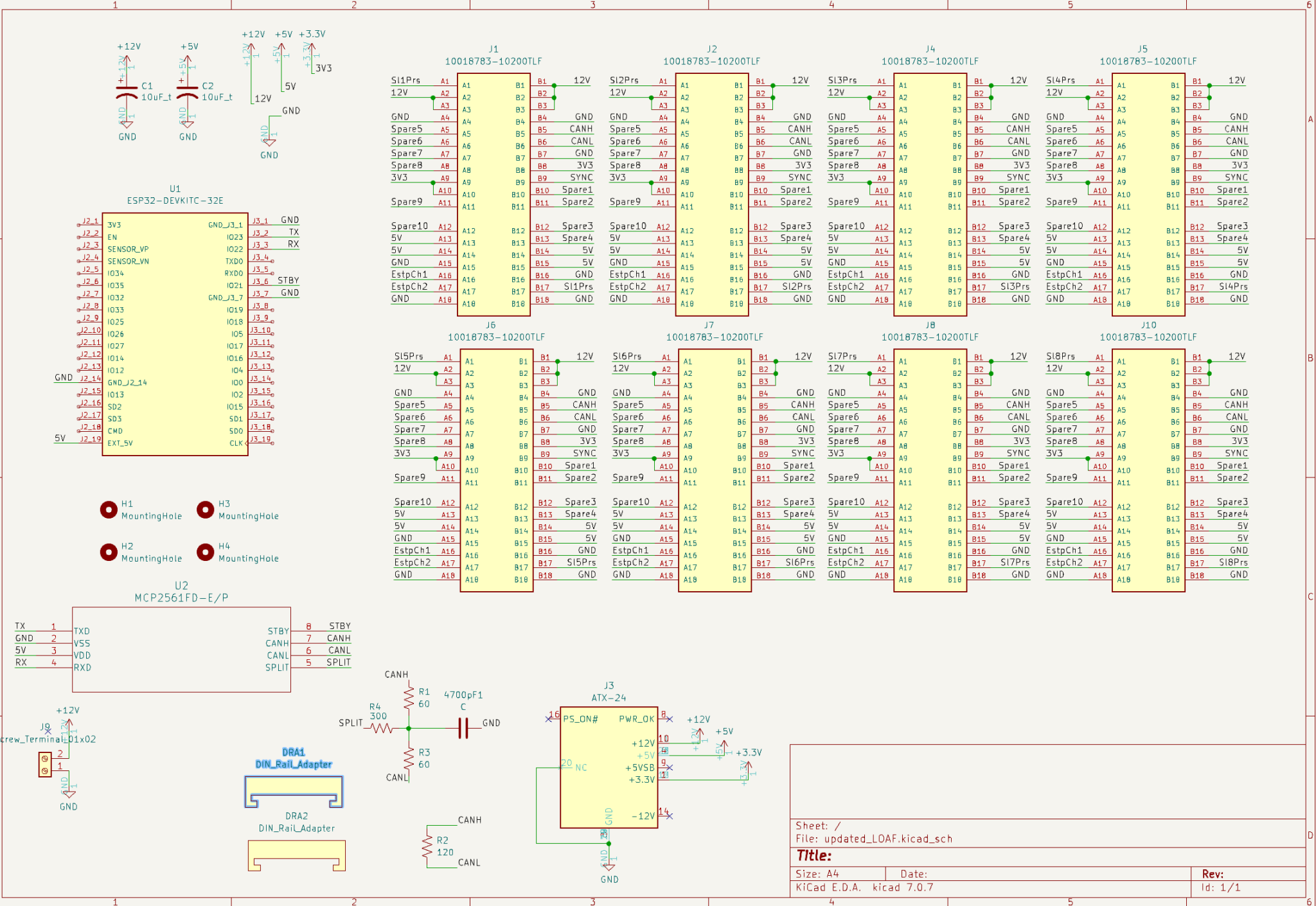
- Completed Loaf schematic and worked on PCB layout
- CDR prep
To Do
- Complete and Order Loaf PCB
- Review DAQs updated PCB
9/20/24
Progress
- Received parts
- CAN transmitter and receiver breadboarded
- Started Loaf schematic and PCB updates
- Met with UWO to discuss their work on BREAD
To-Do
- Complete and review LOAF design
- Test CAN breadboard setup and verify functionality
9/13/24
Progress
- Ordered components
- Project planning
To Do
- Complete updated LOAF schematic draft
- Spec edge connectors and determine price different
- Spec ATX connectors for powers standard
- Begin breadbording
- Regroup with recyclebot
BREAD DAQ
4/20/24
Progress
- Worked on Report
- Uploaded files to OSF
To Do
- Complete final touches on Report
- Complete checkoff
4/12/24
Progress
- Translation code finished and verified
- Report draft complete
- Resistive sensor tested
To Do
- Complete report
- Clean up documentation
- Prep for checkoff
4/6/24
Progress
- Code combined and debugging began
- Translation code 75% complete
- Set up and configured SQL server
To Do
- Finish debugging Arduino code and test
- Complete and test translation code
- Clean up BOM and other documentation
3/30/24
Progress
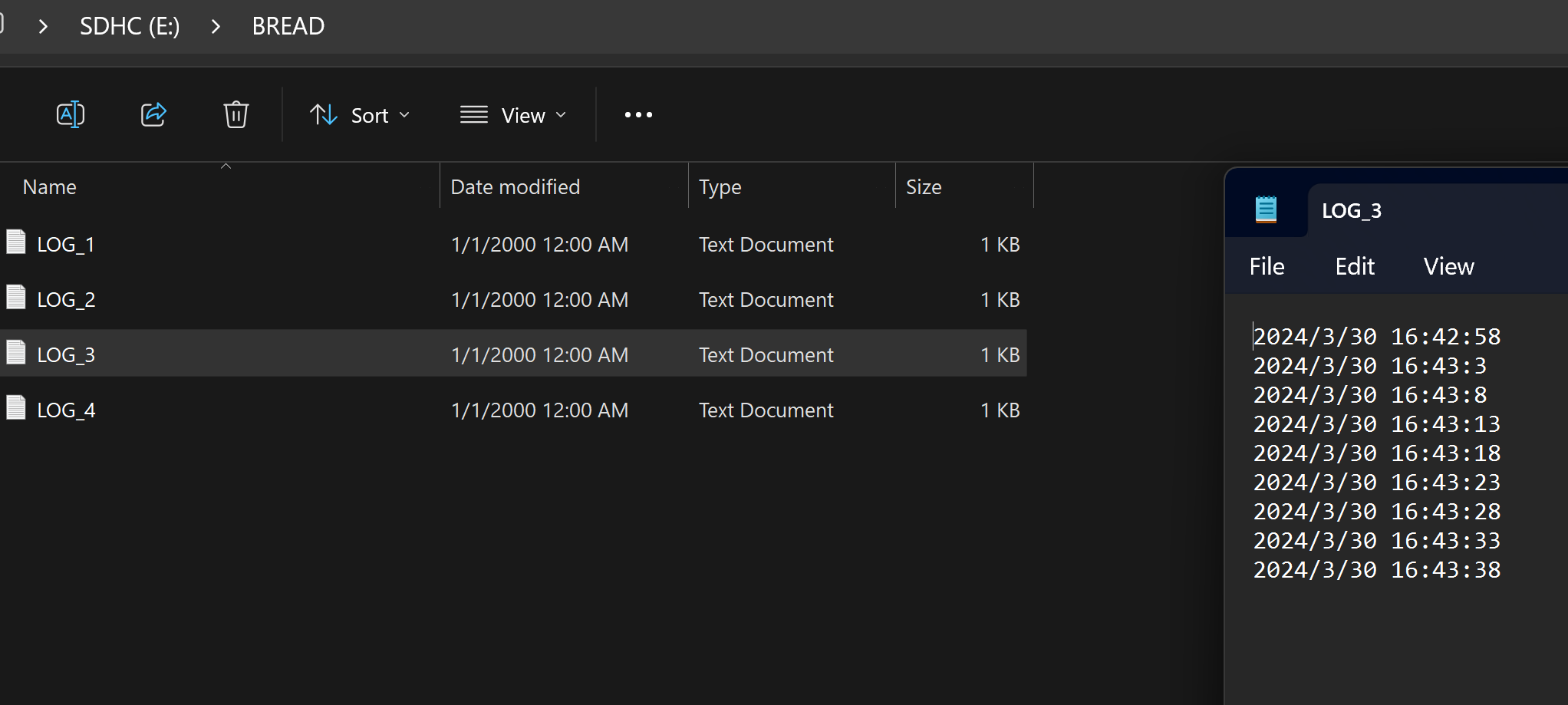
- Got external RTC working
- Worked on Integrated RTC (Not able to get time working)
- RTC logging to SD card
To Do
- Work on transition code
- Continue work on integrated RTC
- Combine codes to make main slice code
- Work on LOAF communication.
3/24/24
Progress
- Completed Soldering board.
- Tested SD code
- Made Updates to PCB to fix issues
- Began Work on RTC

To Do
- Troubleshoot and program RTC
- Potentially order updated PCB
- Work on combining codes
- Work on SQL and translation code
3/16/24
Progress
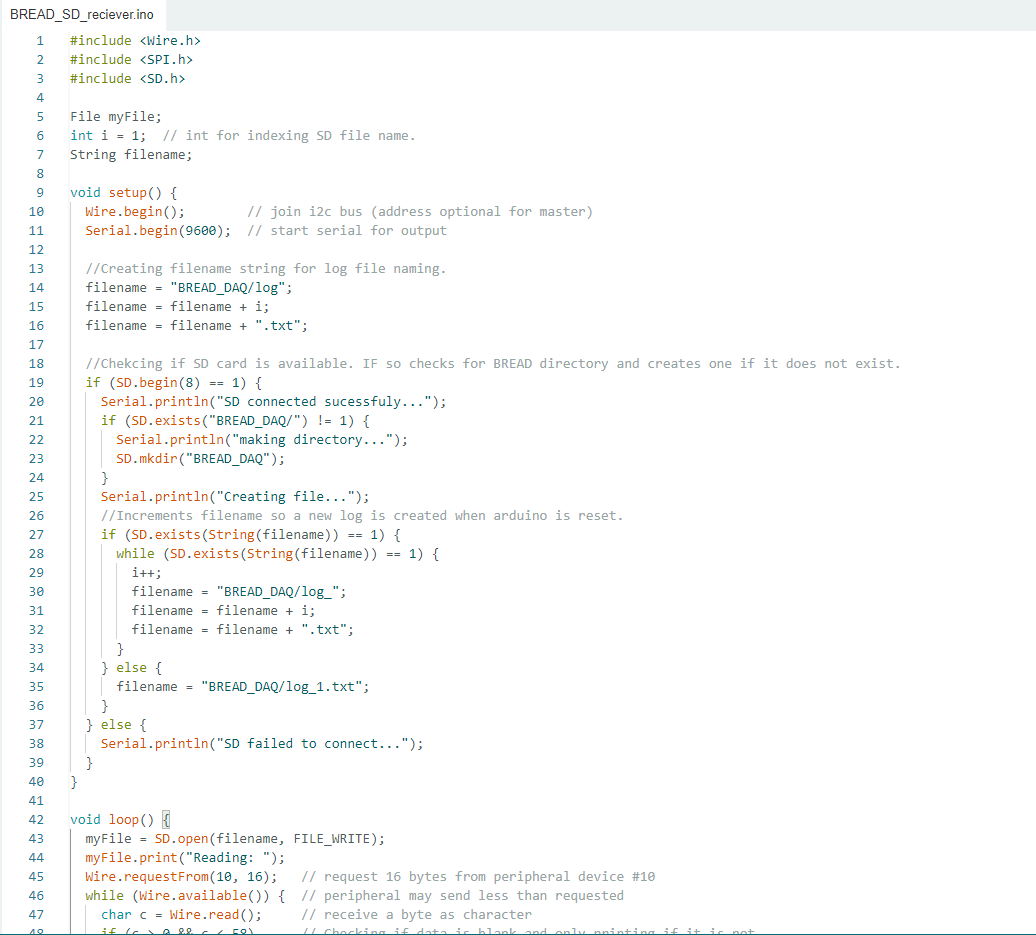
- Began work on SD code
- Received PCB
To-Do
- Solder PCB
- Continue work on SD code
- Set up SQL server and begin translation code
3/9/24
Progress
- Completed PCB Design
- Ordered PCB and components
- Replaced Amplification circuit with ADC to read thermocouple
To-Do
- Work on SD logging code
- Solder PCB and test once parts arrive
- Set up SQL server to write logged data to
2/24/24
Progress
Recap
- Added improvements to PCB design
- Worked on Amplification circuit
- Added switches so that terminals can be used for both Amplification and Voltage divider circuits.
To Do
- Complete Amplification circuit
- Finalize and order PCB
2/17/24
Recap
- Completed CDR slides
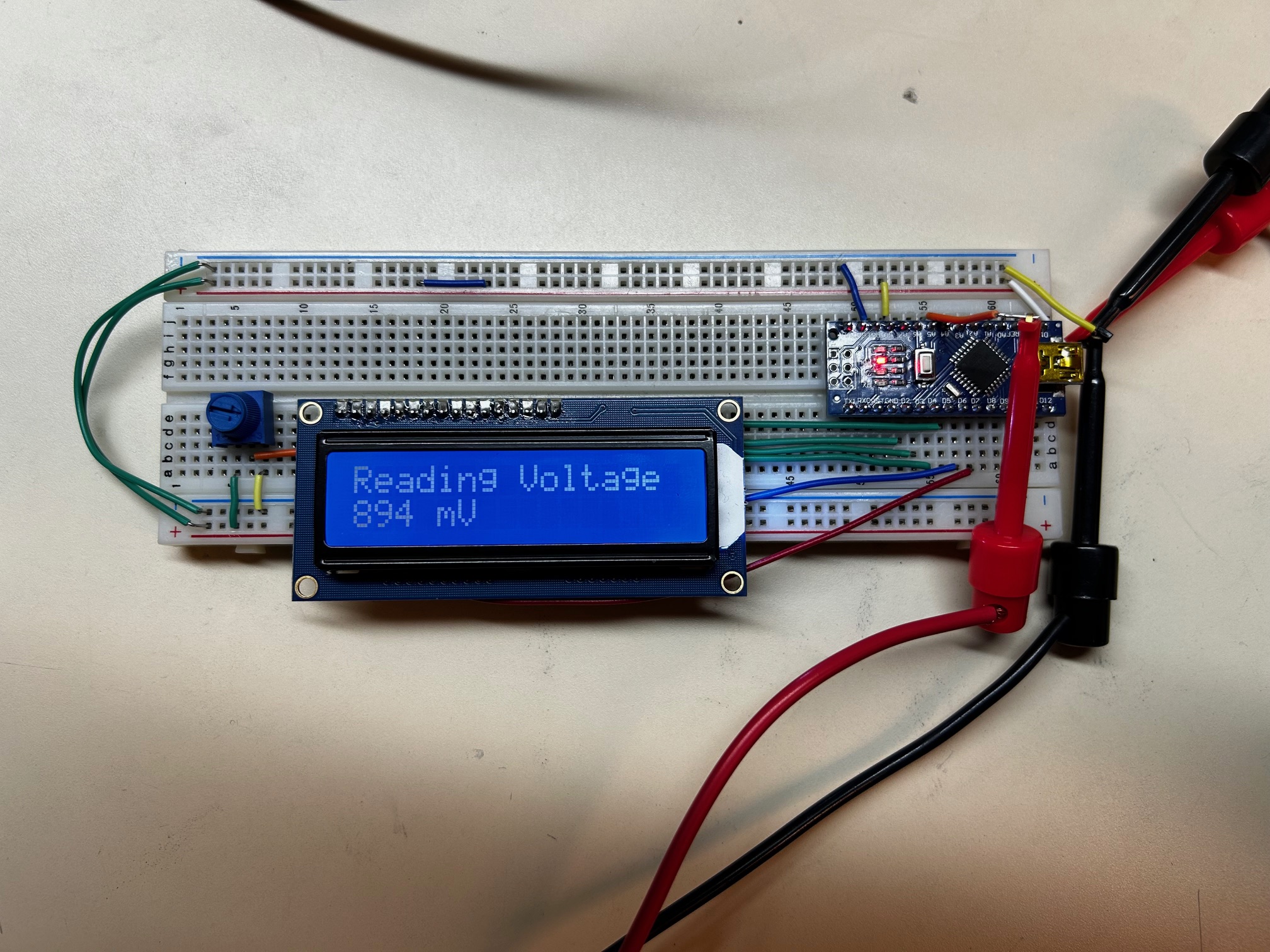
- Breadboarded the Op-amp and potentiometer circuit and began testing
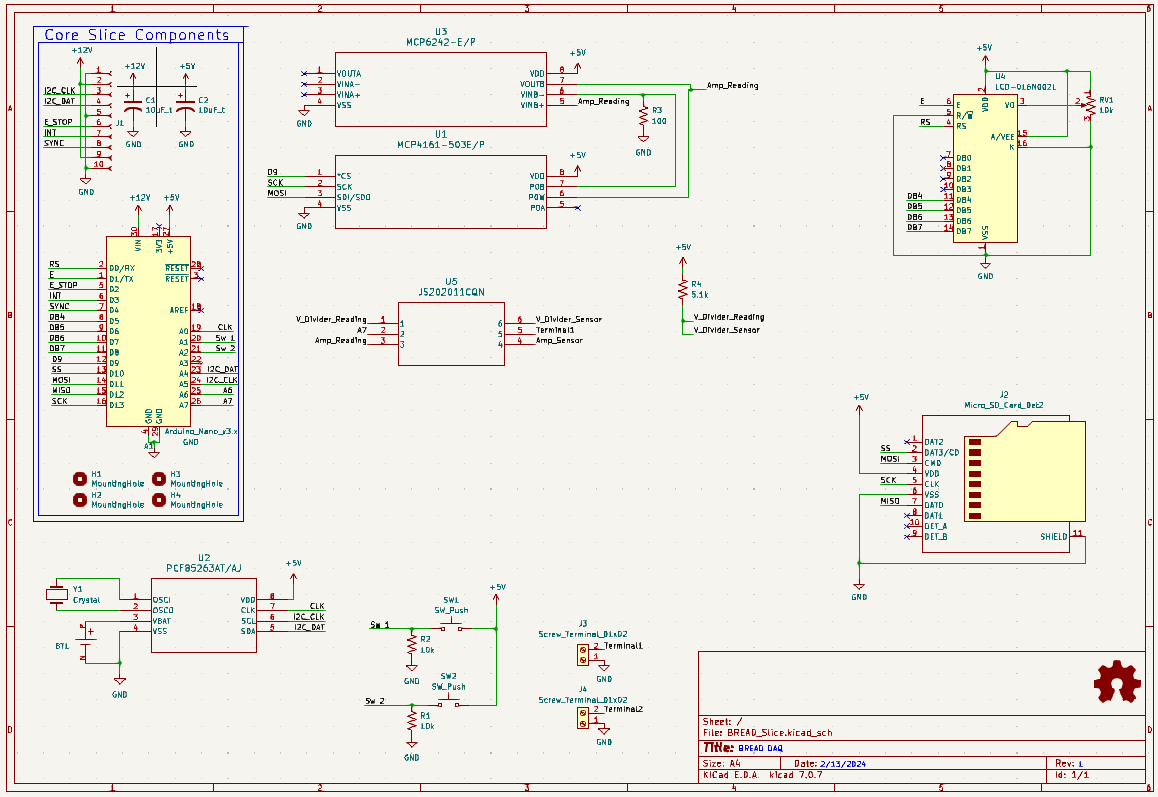
- PCB design draft completed
- Made Voltage reading display and conversion on LCD
To Do
- Review and order PCB
- Continue work on Amplification circuit.
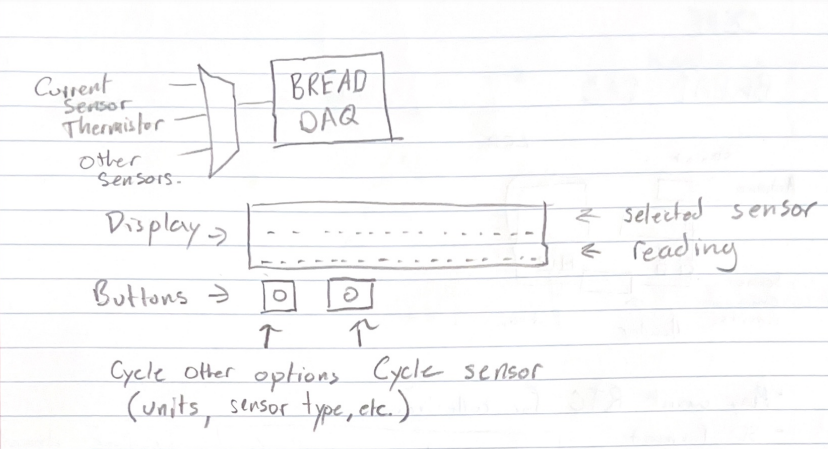
- Work on buttons to cycle sensor type.
2/10/24
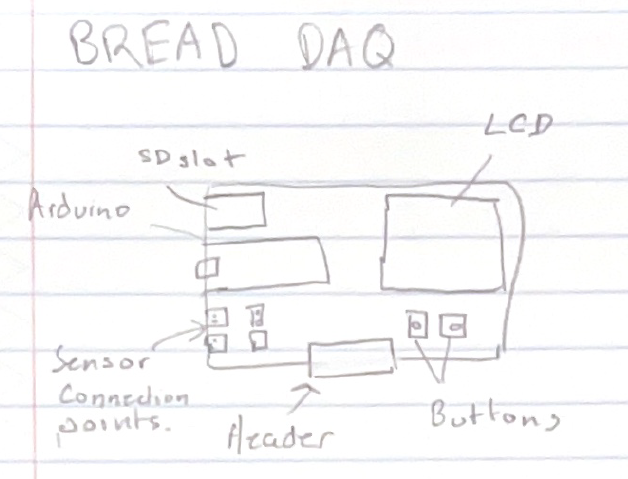
Sketch
Recap
- Completed schematic design for RTC, LCD, battery backup, and Arduino.
- Completed skeleton code for LCD.
To Do
- Complete Op amp and digital potentiometer schematic design.
- Begin PCB design.
- Breadboard and test design.
2/3/24
Recap
- Began breadboarding.
- Ordered Parts.
- Began breadboarding and programming for LCD display.
- Skeleton code made for unit/sensor conversion
To Do
- Begin breadboarding measurement circuit once parts arrive.
- Connect to digital potentiometer to set resistance.
- Develop Amplifier circuit for measurement.
- Begin PCB design.
1/27/24
Sketch
To Do
- Begin Breadboarding.
- Work on LCD code.
- Research and begin code for data conversion.
- Develope circuit for sensor amplifier.
BREAD Vision
11/4/23
Recap
- Completed final design Changes to PCB.
- Re trained Yolo model to improve defect detection.
- Printed a new camera mount.
To Do
- Work on I2C communication.
- Order PCB.
10/28/23
Recap
- YOLO running and detecting objects on Pi
- Modified and improved slice PCB design
- Fixed Wifi connectivity issues with Pi
- USB camera code is functional
To Do
- Order PCB
- Improve image recognition consistency
- Implement I2C communication to Arduino from Pi
10/7/23
Recap
- Completed Slice Schematic and Board layout.
- Printed mount for spectroscopy camera.
- Captured and boxed images of a sample cup to train our YOLO model.
To Do
- Review and order PCB for physical slice.
- Continue working and refining YOLO model.
9/22/23
Recap
- Downloaded and installed all necessary programs to work on the Raspberry PI and Arduino.
- Received our USB camera.
- Set up TeamViewer on the Pi so that remote work and file transfers can be done remotely.
- Began work on physical slice.
- Went thought the documentation and guides for YOLO algorithm.
To Do
- Complete rough schematic of slice to be reviewed by team.
- Begin plan for collecting and training algorithm.