
Week 2:
Reflection: As anticipated, the closed sourced software with no documentation blew up in our face when trying to connect to the LiDAR with the required engineering tools. This represents a major pain, and will make our lives substantially more difficult unless S1Ck Responds soon. The Raspberry Pi 4 being verified to have been dead has lead to the expansion of the budget of the robot, which however will help us grease the wheals of this projects with relatively less suffering than needed by opening up better material options. Long term objective visions were and agreed upon with relatively little change.
ToDo List:
- Get Internet Configured on the old Raspberry Pi 3 while we wait for the new 4b
- Figure out why the LiDAR is not communicating with any computer, what the light arrangement means, and hope that S1CK responds to the email.
- Trouble shoot the LiDAR and reread the documentation, even if it was next to useless.
- If communication is achieved with the LiDAR, begin prodding at it in SOPAS.
Concerns:
- I have seen no useful information relating to the Lidar we are using online, and not got an email back from S1CK yet. We reached out to people who competed with this LiDAR prior, and they had very little positive to say. It appears as though this LiDAR Connection issue with absolutely zero useful documentation is emblematic of an absolute nightmare in the making.
- The Wireless connection on the PI 3 we had set up is now not working, which means wasting more time working on it till we can get our alternative, or hitting a road block.
Time Spent: 14 hours
Week 1:
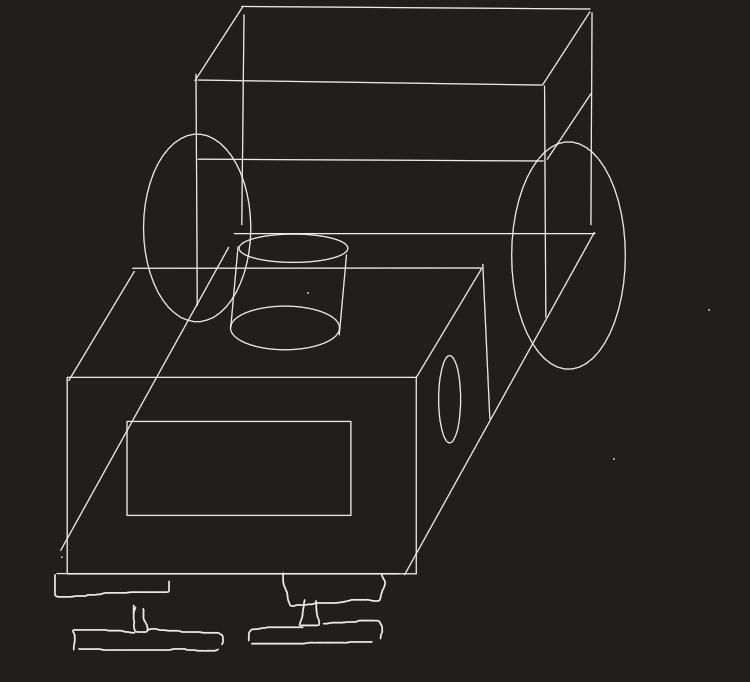
Sketch of the project:
Todo List:
- Establish communication with the LiDAR
- Determine long term semester objectives and means of accomplishment
- Test Raspberry Pi 4b for possible fixes to it no longer booting or displaying information
Concerns:
- Software Concerns With utilizing SOPAS
- Budget concerns relating to the Death of our Raspberry Pi 4b
- Networking and communication issues with the LiDAR
- Time constraints relating to S1Ck Challenge.
Time Spent: 7 hours
Week 5
Last week I was able to accomplish most of my goals, excluding the set up of my google forum for the social media team. I am running into issues with the google drive I can’t seem to circumvent creating a difficult situation to rectify. Additionally, I this week, our team developed our drive train for the scrub brush, after bouncing around the ideas of creating a drive shaft, or our current method which is essentially direct drive. We ultimately decided to take the route of direct drive, at the down side of having to find solutions for motor locations, in which we modeled adapted for the frame that they would sit from. We have begun 3d printing these parts, as well as a chuck for drive train to connect to the brushes.
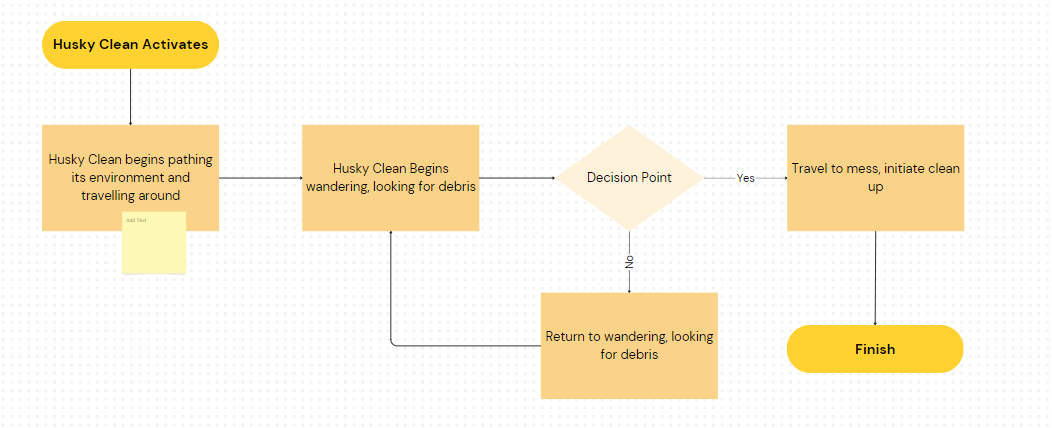
Image of my Husky Clean Diagram:
TODO List:
- Research Networking YAML
- Integrate scrub brush drive train
- Set up ROS
- Fix the Social Media google form.
- Attend Team, general, and sub-team meetings.
- Husky Clean Movement Testing
Concerns:
- Having Husky Clean be compatible with remote controls
- Integrating the code over fully to be capable of testing
- Being potentially unable to correct the issue with our social media google form
Week 4
Last week I was able to accomplish all of my expected tasks, excluding that of the raspberry Pi 4, due to shipping delay’s. In additional good news, our team got accepted by the SICK $10K contest, so we will be receiving the LiDAR and be able to maybe work on navigation this semester. The initial stages of design relating to the scrub arm are starting to take shape, however more will be discussed next Tuesday during my typical lab time. Not much to talk about at this time to be honest, as I had two exams last week which limited my efficiency and time to just my required objectives. I am going to have to continue looking at networking information for our Pi, as well as getting ROS on our system, but that shouldn’t be a problem. I also finally have the login for the OSHE Instagram and had a sub team meeting, so soon we will begin working on projects for the enterprises social media. As of currently I am making a google forum for social media posts, but am having issues getting it connected to a drive so recipients can upload files. I am probably going to do the arm work Tuesday, and then piece meal everything else as I have free time throughout the week.
TODO List:
- Research Networking YAML
- Design Scrub arm and drive train it
- Investigate ROS setup more
- Fix the Social Media google form.
- Attend Team, general, and sub-team meetings.
Concerns :
I am very worried about meeting our production deadlines, considering we will be receiving alot of our parts much later than we would like due to the weird shipping times of the parts we have ordered, making this project arbitrarily harder as a result. Other than that I have no real concerns at this moment, or acceptance in the SICK challenge has made my fears relating to its autonomy been sated, until the coding part of that starts. Honestly not much to talk about this week, which is nice considering things are going as planned excluding shipping times.
Week 3
- Attended weekly team meeting, in which we discussed our scrubbing solutions, and researched system requirements for our LiDAR and chosen operating system, resulting in the conclusion that we would not be capable of using our Raspberry Pi 3B due to system requirements, which resulted in the inclusion of a Raspberry Pi 4 4g in the budget, as well as the resolution with our prior issues of implementing ROS noetic onto the Raspberry Pi 3B, which only having one gig of ddr2 ram, was incapable of supporting such elevating a prior time sink. As well, our project specification was edited to comply with the feedback from our advisor.
- Spend time on Thursday in the lab creating a Pugh analysis of our various potential scrubbing solutions, that resulted in the conclusion of a typical scrub brush as compared to a helical or coil brushes. The primary reason being due to efficiency being the least costly and most shapely to produce, and the difficulty it would take to produce a drive train capable of powering the alternatives effectively. https://docs.google.com/spreadsheets/d/1UB8-rJ9URwdkEp24IdclxvEbkhHF6FZ32fYADCQYNeE/edit?usp=sharing
- Weekly hour count : 5 Hours.
- TODO LIST:
- Order and Install ROS Noetic on the new Raspberry Pi 4 4g.
- Participate in the team meeting, OSHE general meeting, and GM-EMI weekly meeting.
- Design and work on a solution for the Scrubber arm and drive chain.
- Work on Gannt Chart for the project’s timeline.
- Concerns:
- Acquiring and installing ROS on the new PI within one week.
- Developing a mounting solution for out hardware on the Shop Vac
- Developing an alternative and effective mapping system if we do not receive nomination for the SICK LiDAR challenge.
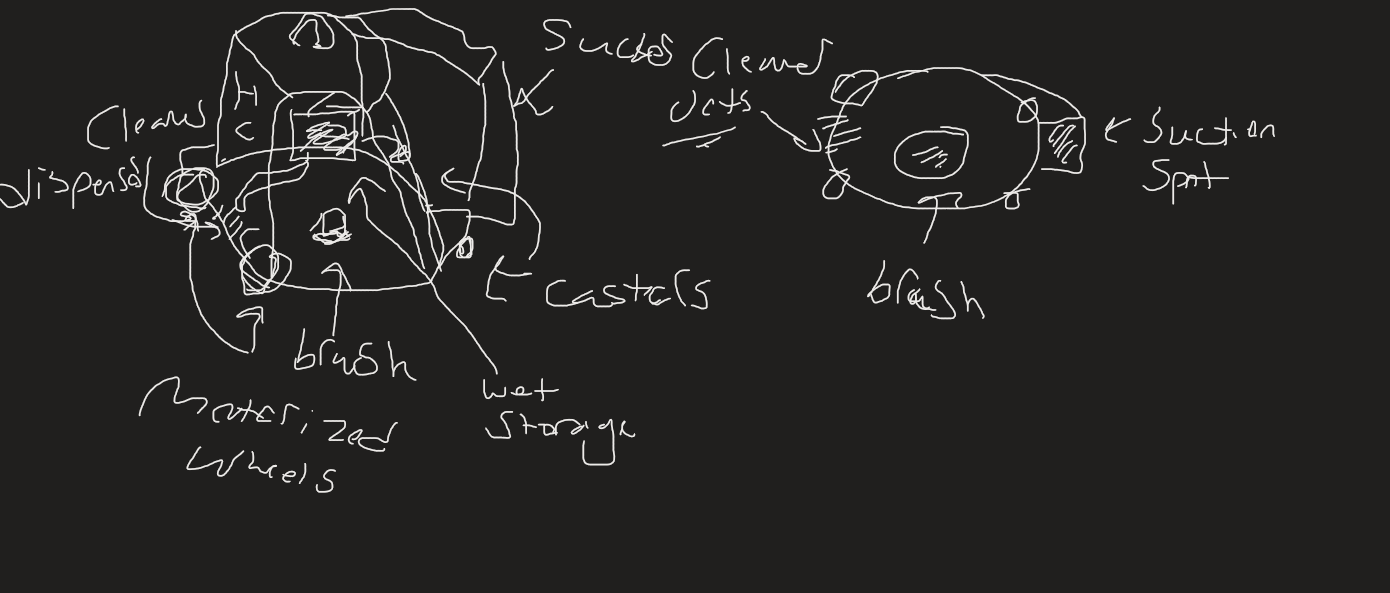
- My inception of Husky Clean
Week Two
- Attended the weekly team meeting, where power calculation, ROS difficulties were discussed, Coding complications that altered our expected difficulty of autonomy where mentioned, discussion of which shop-vacs to acquire where had, as well as various other expected team roles.
- Participated in larger OSHE team meeting, in which we learned of the Bird Deterrent Project.
- Spent Friday from 10am – 2pm in the lab testing the two Raspberry Pi’s, coming to the determination they both work, although one is having a low voltage issue, both are Pi 3 B’s, which will present problems running versions of ROS we have deemed to be ideal, and both were having issues connecting to school networks, necessitating me connecting them to my hotspot in order for them to connect to the internet. One became flashed with Raspbian, and the other remaining as it was previously. Both had to have their internal clock’s updated. Overall we learned alot about them, and future issues we are going to be presented with as a resulted, resulting to the conclusion we would have to flash a version of Ubuntu on the Pi not experiencing a Low-Voltage issue, and attempt using ROS from there.
- Participated in GM-EMI meeting, in which the team discussed our project proposal secured 900 Dollars of project funding.
- Weekly hour count: 9 Hours.
Week One Update
- Participated in an initial Husky Clean meeting orientation via Discord where Project proposal was discussed
- Participated in an in person Husky Clean team meeting where design decisions, sponsorship and budgeting where discussed
- Participated in the larger OSHE Team meeting.
- Sorted through Grow Bot’s part drawers with team mates and cataloged useful parts and items.