
9/15/2024
My goal for this upcoming week is to gather more research on acoustic communication, look into hydrophones, and potentially start building one. For acoustic communication, I need to look into exactly how it works and what equipment is needed to use it. For the hydrophone, I need to compile a list of all the parts I will need and I need to find a resource about building them from scratch. My only concern comes with building the hydrophone. I’m hoping that every part is easily accessible and buildable with what we have.
9/22/2024
My goal for this upcoming week is to get parts ordered for the hydrophone and the acoustic modems. If parts come in this week I can begin putting stuff together but if not that will be my goal for the following week. I was able to get all my work for this last week finished. I have found very good instructions on building a hydrophone and an acoustic modem. If parts come in this week I will begin building the hydrophone first.
9/29/2024
Last week hydrophone and modem research was finished and another teammate began building a hydrophone so my goal has shifted. My goal for this week is to work on a software called GNU radio and to try and get that working. We will use GNU radio for our acoustic communication. I would like to have it working by the end of the week but if not, I will continue working on it into next week.
11/5/2024
I have made substantial progress over the last few weeks since the last update. Firstly, we have decided to switch from using GNU Radio to ROS. Using ROS through Linux, I have set up a basic acoustic transmitter and receiver. The first version of the programs could send a string of words as a binary signal. The newer version sends directional arrow key inputs as different frequencies. The next goal is to get the code to transmit the directional inputs as binary bit strings. We also need to get the same ROS system set up onto another set of flash drives and test communication between two separate devices.
1/23/2025
To start the semester, we are moving from ROS to ROS2. I have a new flash drive set up but still need to rebuild the communication setup. This is my main goal for the coming week. Once the modem is set back up in ROS2, then I will begin to try and improve upon it software-wise. The range is quite low and we would like to start programming more controls for the fish to achieve.
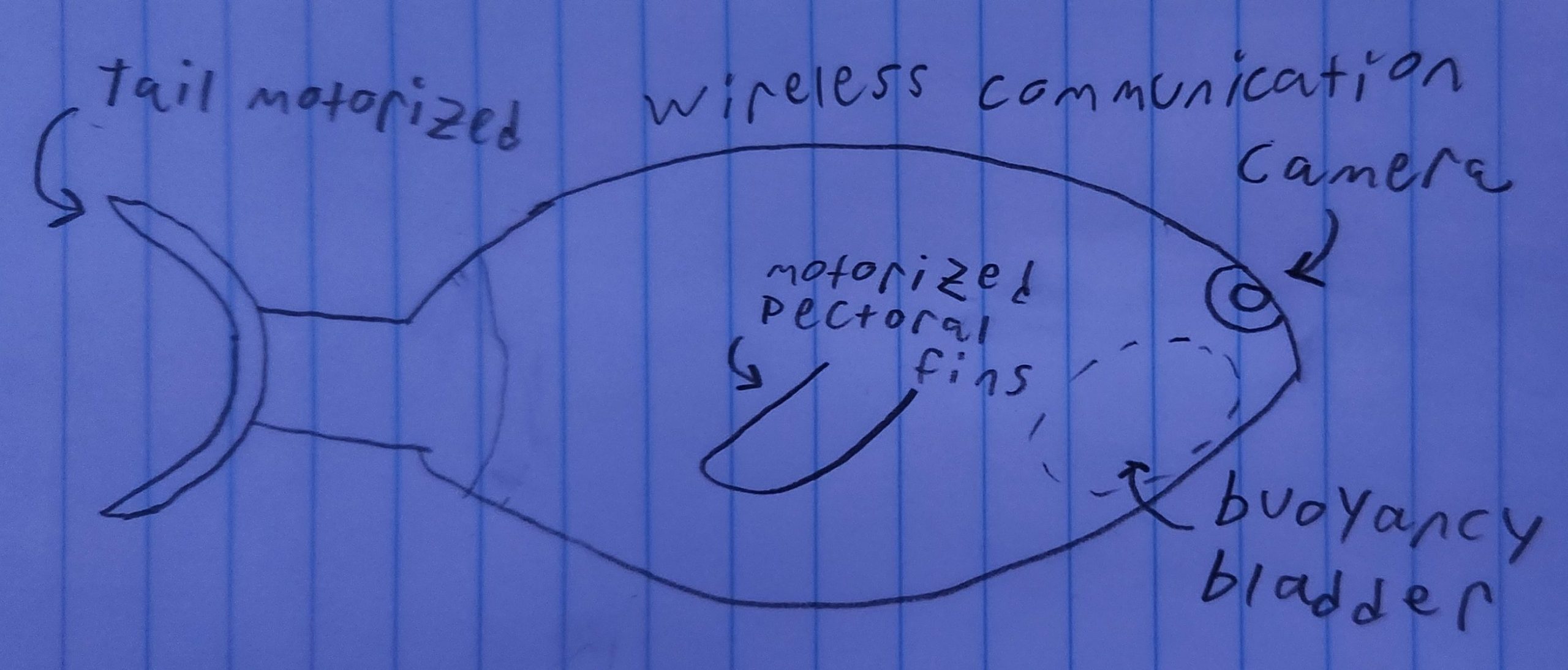
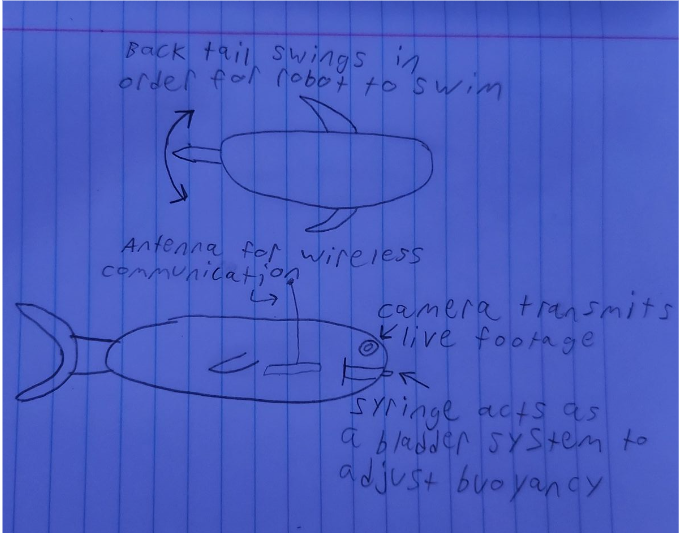
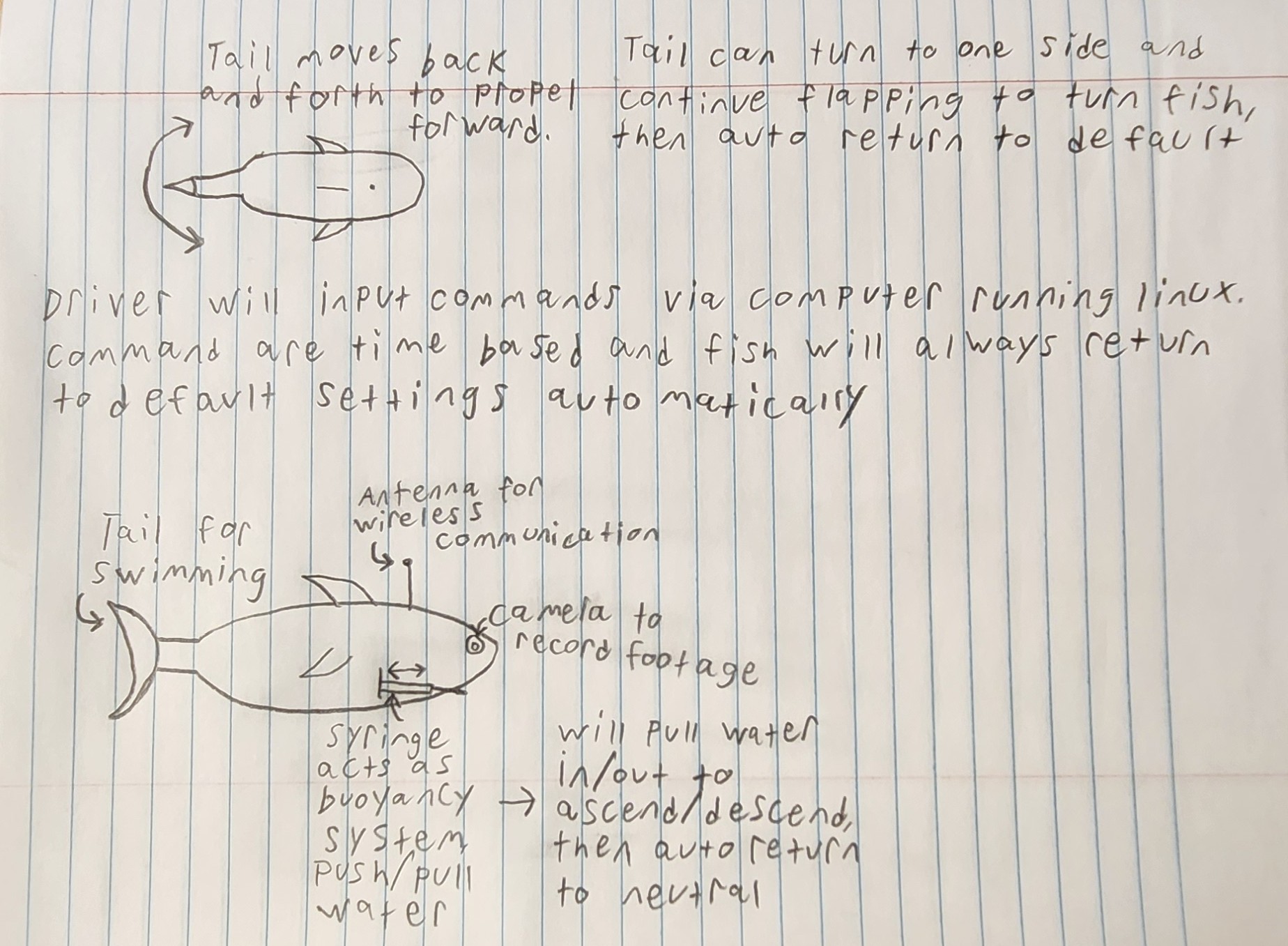
No major design changes have been planned for the fish besides scaling everything up at the same rate. My previous drawing is still accurate for how I believe the fish will look by the end of the semester.
1/26/2025
I haven’t done any work between this log and the previous log, as they are only three days apart. However, my plans for the upcoming week have changed a little bit. My teammate, Ike, has made a multitude of new python scripts for the modem and it’s different functions. I now need to implement these new programs into ROS2 instead of the old programs.
2/4/2025
Last week I was able to get the ROS2 workspace set up and all the Python scripts put into place. For the upcoming weeks, I need to upgrade the second flash drive so that my teammate can also have access to the new system. I will also work with him to improve the existing programs and get them to communicate with each other through ROS. I do not have many concerns about these tasks. These goals are fairly straightforward and should go smoothly.
2/16/2025
Last week, we were able to get the ROS issues figured out, and now I am able to really start cracking on it. My goal for this next week is to get everything up and running so we can begin optimization and testing for the python scripts.
3/3/2025
I ended up having more ROS issues arise to trouble me. The week before break, I was finally able to get everything working for sure this time. I was able to successfully run an example python script, so I know that the ROS portion of the system is now working. My goal for this upcoming week is to meet with my teammates and work together on the Python scripts. Unless more ROS related issues arise, things should go relatively smoothly.
3/17/2025
The ROS2 transition is finally finished and the old versions of the receiver python script successfully ran. I was also able to clone the flash drive so we have two flash drives working. Now that the ROS2 workspace is set up and working, the goals for the future are to update the codes and get newer versions up and running.
3/24/2025
We were able to make a lot of progress on the program. The Linux workspace successfully ran a hub, transmitter, and receiver codes. All three programs worked correctly and ran with no issues. Next, we need to start implementing motor control functions. Currently, the commands are sent, received, and translated but they don’t actually do anything. We need to get that implemented and start testing on the fish as soon as possible.
3/31/2025
We were able to get more programs communicating, and we got our programs set up on the Raspberry Pi. The speed program successfully ran a motor in the intended way. Now we need to start integrating into the fish and test ASAP as we only have a few days left.
4/13/2025
We were able to get all of the code working and successfully moving the motors. A new fish body was finished, and all of the parts were integrated into the fish. Waterproofing still needs improvements as well as the buoyancy system, but every other aspect of the fish is now working.