
Work Log 1
Find two electric skateboards and pull info on them to determine a baseline.
Focused features were battery, motors, speed, and range.
Work Log 2
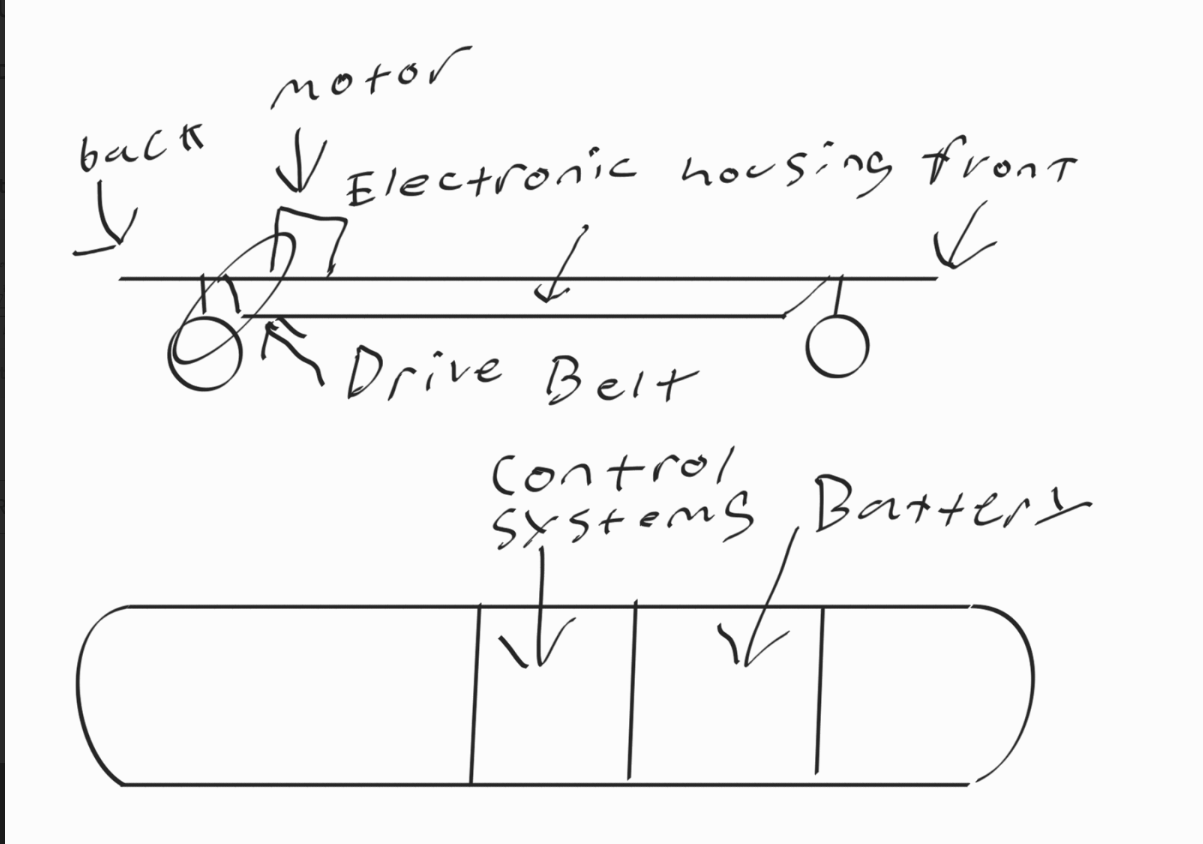
Detail the design for the control slice.
My portion was to determine possible communication protocols.
Choices were narrowed down to I2C and CAN for the low number of wires used and the ability to have multiple masters in the system.
I2C is more integrated and natively supported in the Arduino family. CAN is very robust yet isn’t natively supported. Use of CAN may be cost prohibitive.
Work Log 3
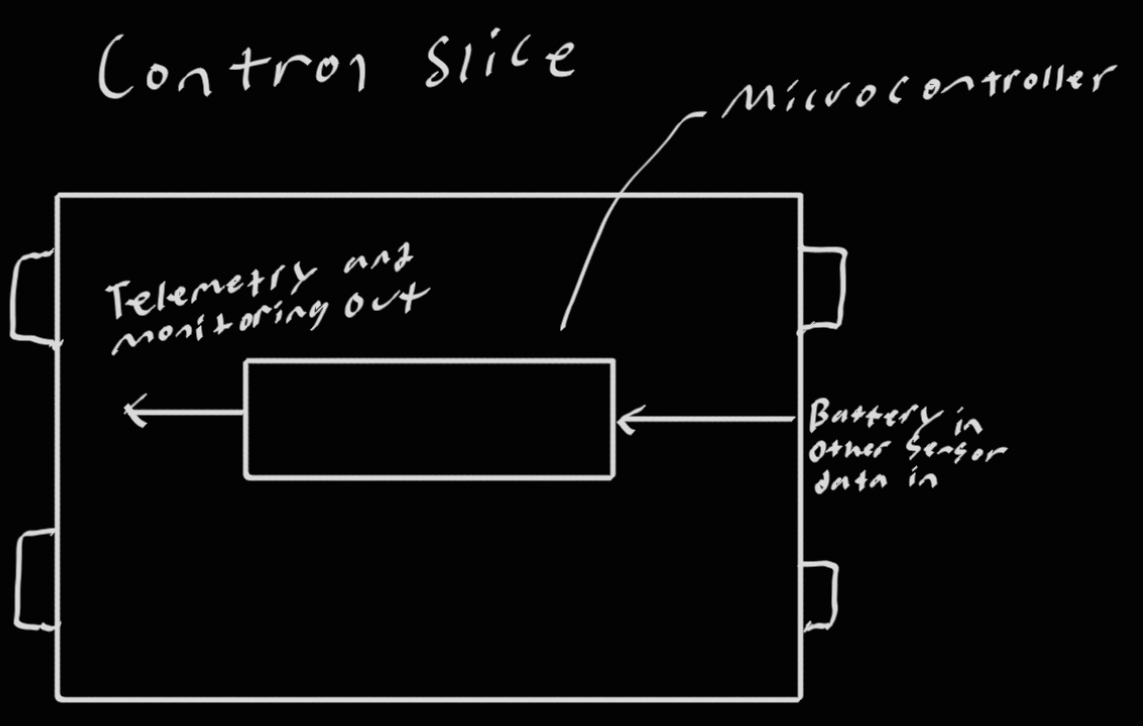
My particular project is the control slice of the overall board. Lots of changes has occurred this past week. Previously the control slice was going to be the “middleman” for most of the operations as it would take in speed inputs from the user and output those to the drive slice. However, the overall project saw a change in execution to achieve our goal. The project is going to use more off the shelf components than originally planned. This will help realize our goal of making this easy for others to replicate the design. In the previous week we worked on what microcontroller would be used and what communication protocol we would utilize. With our new plan for the slice the microcontroller may become obsolete, we may need to switch to something like a raspberry pi to run the software needed. For this coming week we are working on figuring out how to switch the slice over to the new plan of telemetry gathering/reporting and battery monitoring. We found an open-source software called VESC that looks like it will do exactly what we are after, so a major goal is to become familiar with this software and its implementation. We also need to get a full list of parts we need ordered. We will also need to get with the battery slice to see what things we need covered that the batteries BMS doesn’t cover. Some concerns I have for the week is how this new project redefinition will affect the previous goals for the control slice and how those will change.
Work Log 4 (Begin semester 2)
Some general project updates have been made. We are adapting the modular design to function on an existing skateboard and not just the 3D printed design. This week the main goal is to try and find a software solution to a multi battery detection system. We need the design to be able to allow the end user to add an additional battery to the system as seamlessly as possible. This is likely to be the largest hurdle of the semester. The current thought is to have an additional ESP32 present in each new battery “slice.” This would allow the main ESP32 to detect the presence of a new one and respond accordingly. My biggest concern would be getting this system to work as flawlessly as possible. It will be difficult to test because our own board will only have the one battery so we will need to simulate the second battery in some way.
Work Log 5
For week 5 the goal is to continue fleshing out the multi battery detection system. We need to get the code sorted to detect a new ESP32 on the CAN Bus. The biggest concern is the same as last week and not being able to actually test the multi-battery system with a real battery. We will also need to find a way to simulate a battery for testing.
Work Log 6
For week 6 the goal is to continue developing our CAN communication system. We found a CAN transceiver for our system and are ordering it soon. The code will be interesting to learn how to build. Addressing each unit should be relatively easy. My biggest concern is building the code to have as few flaws as possible.
Work Log 7
For week 7 the goal is to continue getting the CAN communication functioning. The transceivers are on order. We now have a library we can import for the ESP32 that provides a lot of CAN support. The main hurdle for this week is to figure out how the VESC integrates with a CAN system. This semester will be very code heavy.
Work Log 8
For week 8 the goal is to finalize the functionality of the CAN communication. This past week had good progress as well as more hurdles. We will likely need to order more ESP32s. Only one of our 3 appear to be working correctly. This prevented the CAN system from being operational on a bread board last week. My biggest concern will be getting the code functioning on the boards in the time we have. Especially with the delayed testing from needing to order more microcontrollers.
Work Log 9
For week 9 the goal is to get the CAN communication working with the VESC. We successfully got the CAN communication working on the ESP32s. We had to use a different CAN library than originally planned to get things working. A lot of progress was made, and it has set us up well for the next week. My biggest concern is getting communication set up with the VESC as we need to use its built-in functions and have less freedom with how it is coded.
Work Log 10
For week 10 the goal is to get the CAN communication finalized with the VESC and find out how we can get telemetry from the VESC. Good progress has been made, and we should be done on time. My biggest concern is how we can get telemetry from the VESC and how we can store that information on the ESP32s as needed.
Work Log 11
For week 11 the goal is to record telemetry on an SD card using the ESP32s. The telemetry will be pulled from the VESC and written to a file on the SD card by the ESP32. This past week we got the CAN communication working on the VESC. My biggest concern is how we can pull the data from the VESC.
Work Log 12
For week 12 the goal is to wrap everything up. The esp32 is writing to the SD card. We just need to get the recordings from the VESC and format the file. My biggest concern is getting everything done in time for the Thursday deadline.
Work Log 13
For week 13 the goal is to get the project documented. The project turned out very well and has some awesome potential. I don’t really have any big concerns for the week as we only have to document.
Work Log 14
For week 14 the goal is to finalize the documentation. The code will be commented soon, and the report draft will be done Saturday. Next week will be a lot of screenshots and walkthrough creation for the documentation. I have no big concerns.
Work Log 15
For week 15 the goal is to finalize the documentation. The code has been commented, and the report draft is done. Next week will be a lot of screenshots and walkthrough creation for the documentation. I have no big concerns.