
Spring 2025
Week 1 (1/06 – 1/10)
The progress on Husky clean has been incredible so far, and it’ll be great to see the progress the whole team makes this semester. Week 1 usually doesn’t have much going on, but it’s important to hit the ground running. Most of the hardware on the robot is functional, but items like the pump, coding, and general refinements are key to improving the robot. Here’s what happened this week:
- Went over housekeeping stuff before this week’s team meeting
- Helped create a new project spec for Husky Clean this semester
- Formulated ideas to help onboard new folks into OSHE
- Worked to set a meeting time for our team this semester
- (I also need to be better on documenting stuff this semester)
(Side Note: I forgot to place the updates here for earlier weeks – I will update this soon.)
Week 11 (3/24 – 3/28)
After an intensive week of coding the obstacle-avoidance algorithm for the robot, we finally got it to work! There’s still a lot that needs to be done before the design checkoff, though, so we’re trying to get those all taken care of before things are being wrapped up. This includes:
- Tuning and refining the parameters of the obstacle avoidance stuff
- Improving the handling and controls for the diff drive on the robot
- Also, the robot runs without input from the controller – concerning – so we’re looking into that as well
- Presented the code to the team who made the Arduino to get feedback for the robot’s control.
- Earlier, we presented the design progress to the whole team for feedback, most of which includes much-needed improvements to the casters and pump mount assemblies. (which will eventually impact driving and then code)
- We’re in the home straight! It’s just a matter of getting things where they need to be at.

Fall 2024
Week 1 (8/26 – 8/30)
- Joined the enterprise!
- Reviewed all associated materials for the Husky Clean project
- Set up necessary items on website for the semester
- Met with team members to establish a meeting time and project details
- Went through miscellaneous parts to be used for the upcoming project
- Briefly toured the lab to see what equipment is available for use
Week 2 (9/2 – 9/6)
- Met with team to create project spec for the semester
- Went over assigned tasks
- In Albuquerque 9/4 – 9/7 due to grad school conference
Week 3 (9/9 – 9/13)
To-do list for the coming week:
- Begin full CAD model for the Shop Vac
- Create vacuum body, bladder, and LiDAR in assembly
- Determine what version of ROS will be used on the Pi
- Assist in creating a specific Gantt Chart track to build progress
- Figure out how battery, electronics, and water systems will route around the robot
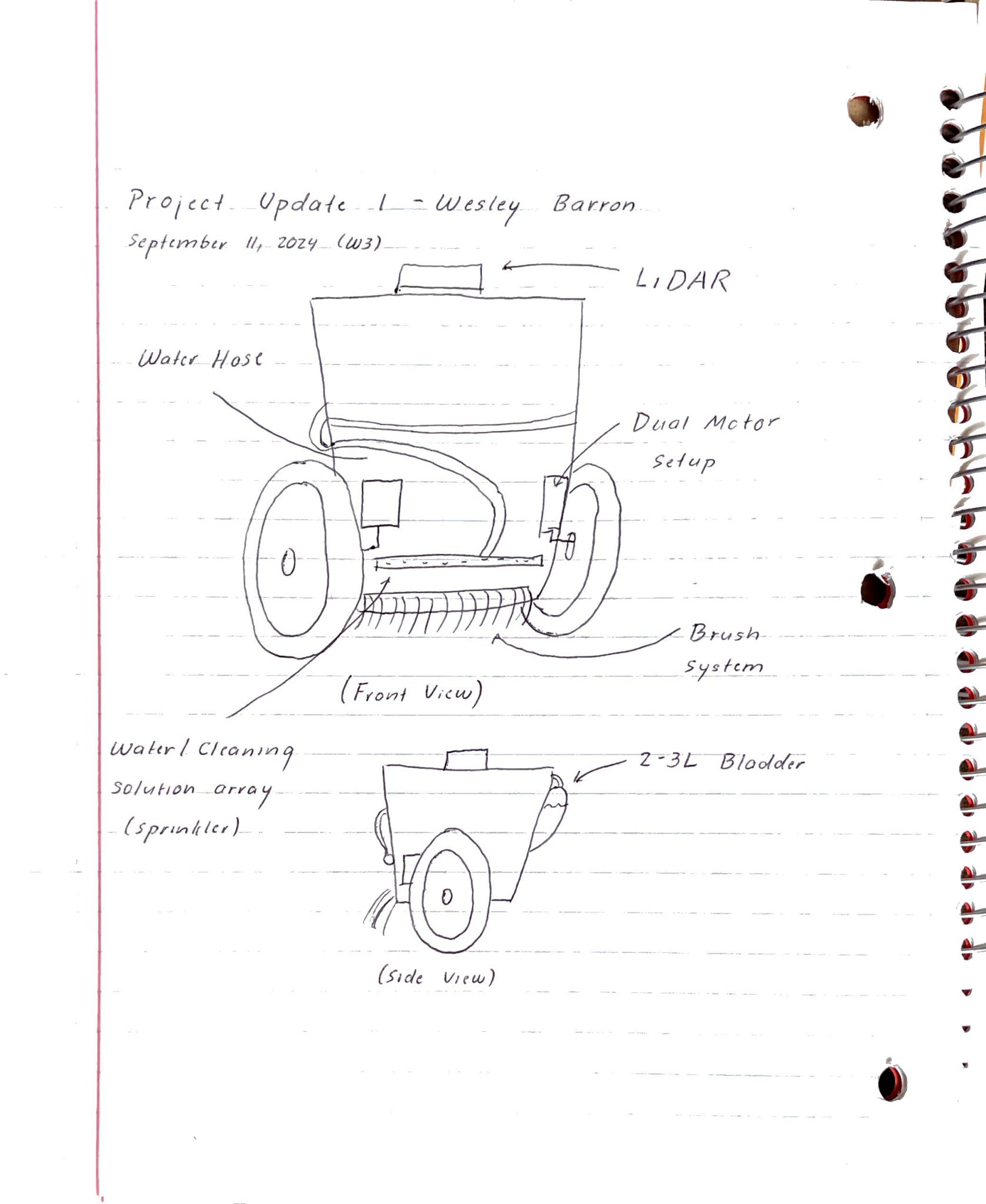
(Please pardon my terrible drawing)
Possible Concerns
- Layout, parts, and functionality are still way too vague
- Still need to figure out the battery, motors, and bladder system
- Workload distribution may be a bit uneven – still hard to tell at the moment
Week 4 (9/16 – 9/20)
Recap & To-do list for the coming week:
- I was able to get (briefly) started on the CAD file for the whole robot, but a lot of that work will be continued into week 5.
- Continue building the CAD files
- Check over possible locations to place the SICK LiDAR sensor
- Review the electrical diagrams made last week, and see if those will work with the current design
- Critical design review is coming up fast, meaning the whole team and I will have to have a lot of deliverables ready by week 6
- It would be nice to develop a solid testing plan so the project can be designed accordingly
Week 5 (9/23 – 9/27)
Recap & Todo List
- The body, frame, and LiDAR model for the robot are complete!
- The challenge of where to put electrical and scrubbing systems remains
- Ultimately, packing is the most difficult part.
- Outlined progress so far for the CDR presentation tomorrow
- We still need to develop a robust testing plan, too.
Week 6 (9/30 – 10/4)
Recap & To-Do List:
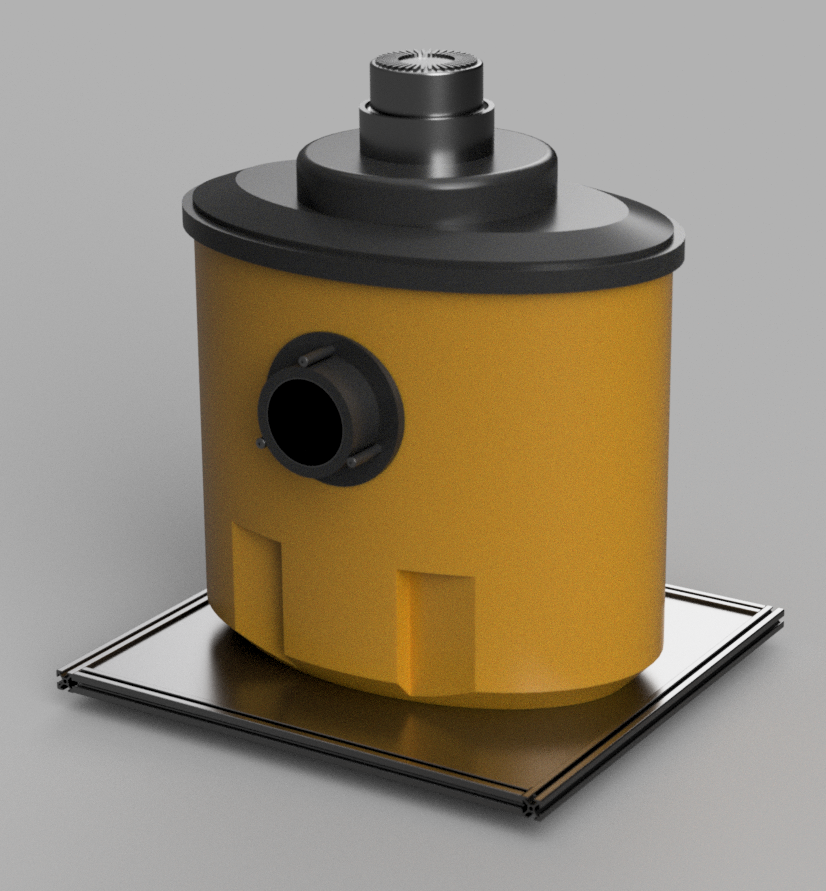
- Our team finally took delivery of the LiDAR, motor, and vacuum body
- Begun work designing scrubbing mechanism components, including scrub motor and brushes
- Attended Enterprise Day on behalf of Husky Clean – many people were interested in the model above
- Prepared and helped present the project for this week’s CDR; here are some important notes from the presentation:
- Will the robot really be moving by week 12?
- Is there an extensive game plan for the future?
- Is there a testing plan in place?
- Was the power supply figured out?
- Main Takeaway: develop a solid project timeline and outline key goals throughout the semester, and not just goals for the end
- Tasks this week include:
- Continue to document and CAD parts for the model – particularly those for the reservoir, hose, and distribution system
- Re-do the model with the actual component dimensions, since the online ones were incorrect
Week 8 (10/14 – 10/18)
To-do list
- Redesign chassis to fit new shop vac and electronics design
- design hose mount from the pump motor
- Shop around for a new shop vac to fit on the frame
- How to fit the bladder on the frame?
- How to incorporate the existing electrical board onto the new frame?
- Will the inverter be necessary?